KEF 104-2 Floor Standing Speaker
Tweeter Replacements
Click on the images to magnify - applies to all.
By chance I spotted a youtube video showing one method to replace an ageing or blown dome KEF T33 tweeter on the KEF 104.2 floorstanders - this reminded me to do something about mine. The video here shows how one guy fixed his tweeter problem with a set of Morel MDT29s. Morel MDT29 Tweeters
I've had my KEF 104.2s since about 2002/2004, and it wasn't long after I blew the tweeters. A temporary solution by my brother-in-law fixed the issue, a direct KEF T33 (SP1191) replacement was not easily available even at this time.
Yesterday, I mulled over several replacements, and finally decided on the french Audax TWO25A2 textile dome tweeter, since they seemed to have a similar spec to the T33s, and would probably fit without too much intervention?
KEF T33B tweeter specification - similar to the T33?
Audax TWO25A2: The sensitivity or output of the 4Ω tweeter from the official specs is stated at "93dB at 1W at 1 metre", although some sources quoted these Audax tweeters at 90dB?
At 1 Watt input, I can only assume that Audax are using P=V²/R, where V is RMS volatge, and R is the 4Ω loading. This equates to: 1 = V²/4, or V² = 4, ie V = 2V rms.
Then for the Audax: 2V rms → 93dB output
Morel MDT40: The temporary fitted tweeters back in 2002/2004 were the Morel MDT40s: wired in twos, in parallel to mimic a 4Ω load to the amplifier and crossover unit.
However, each MDT40 tweeter was still an 8Ω load and was sinking AC audio current as per specification - delivering the quoted "89dB at 1W, at 1metre" distance.
So then, delivering 89dB loudness for 1W input suggests ...
from P=V²/R, 1=V²/8, or V=√8,
ie V=2.83v.
Then for the Morel: 2.83V rms → 89dB output
As a comparison then, by my calculation if the Morel was subjected to 'only' 2V rms, then the output would be less than the 89dB figure. If these specs are to be believed, the difference I experienced must have been at least -4dB, ie the Morel output was down.
As a mathematical suggestion, I may have experienced a further drop from the Morel of 20·Log(2v/2.83v) or -3dB? In total then, perhaps approximately -7dB?
Perceptively, back in 2002/2004 I noticed the treble was down - but I simply got used to it.
The new Audax TWO25A2 4Ω Tweeter
And here again is the Audax TWO25A2 with its face plate removed, and plastic voice coil carefully fastened into place.
Note: flash photography may give the appearance that the dome is distorted - it is not.
Here the Audax TWO25A2 is ready to replace the old tweeter before soldering - my advice is to do the soldering first.
The countersunk screw heads may look a little 'proud', but the tweeters 'seated' nicely once installed, and indeed the screw heads acted as an additional grip. The locking plate in the background slides over and the tweeter can be centered and stabilized thanks to the fastening and centering screw. I may later devise a 'cushioning' interface between the Audax tweeter and the tweeter port on the 104/2 baffle?
Voice Coils
I think it's best to carefully solder with the voice coils removed - very easy and convenient.
Re-assembly
Not an issue, there was plenty of room to slide the Audax tweeters in. The depth of these tweeters is quoted at just over 23mm, not including the face plate.
There is a red marking on the tweeter to signify 'positive'.
As it's AC we are concerned with in audio,
can this only act as a guide so that we avoid
phasing errors between left and right channels?
Remounting the Baffle on to the Main Cabinet
With the tweeters secured and centered it was time reassemble the driver unit.
And finally ...
In use the speakers have come to life - upper midrange and treble re-defining the sound image. So far, so good, I am very happy!
Unanswered Questions
(a) Flatness of Crossover
There is a question concerning the original midrange driver frequency response merging with the Audax TWO25A2's response. At the intersection or crossover frequency - is there a rise, a fall, or is the frequency response reasonably flat?
(b) New Tweeter Power Handing
The power handling capacity of the Audax TWO25A2 is quoted at 55W RMS/DIN?, this is seemingly much less than the handling capabilities of the KEF T33?
However, is that an issue? My Sony TA FB-940R amplifier can theoretically deliver up to 120W into 4Ω, but much of transient music spectral power (individual sinewave component powers) naturally fall off with frequency - something approximating to a 1/f power spectra, much like 1/f 'flicker noise'.
Whats does this mean? Well, it means this - with a doubling of frequency, then expect approximately half the power to be present in the corresponding doubled frequency component.
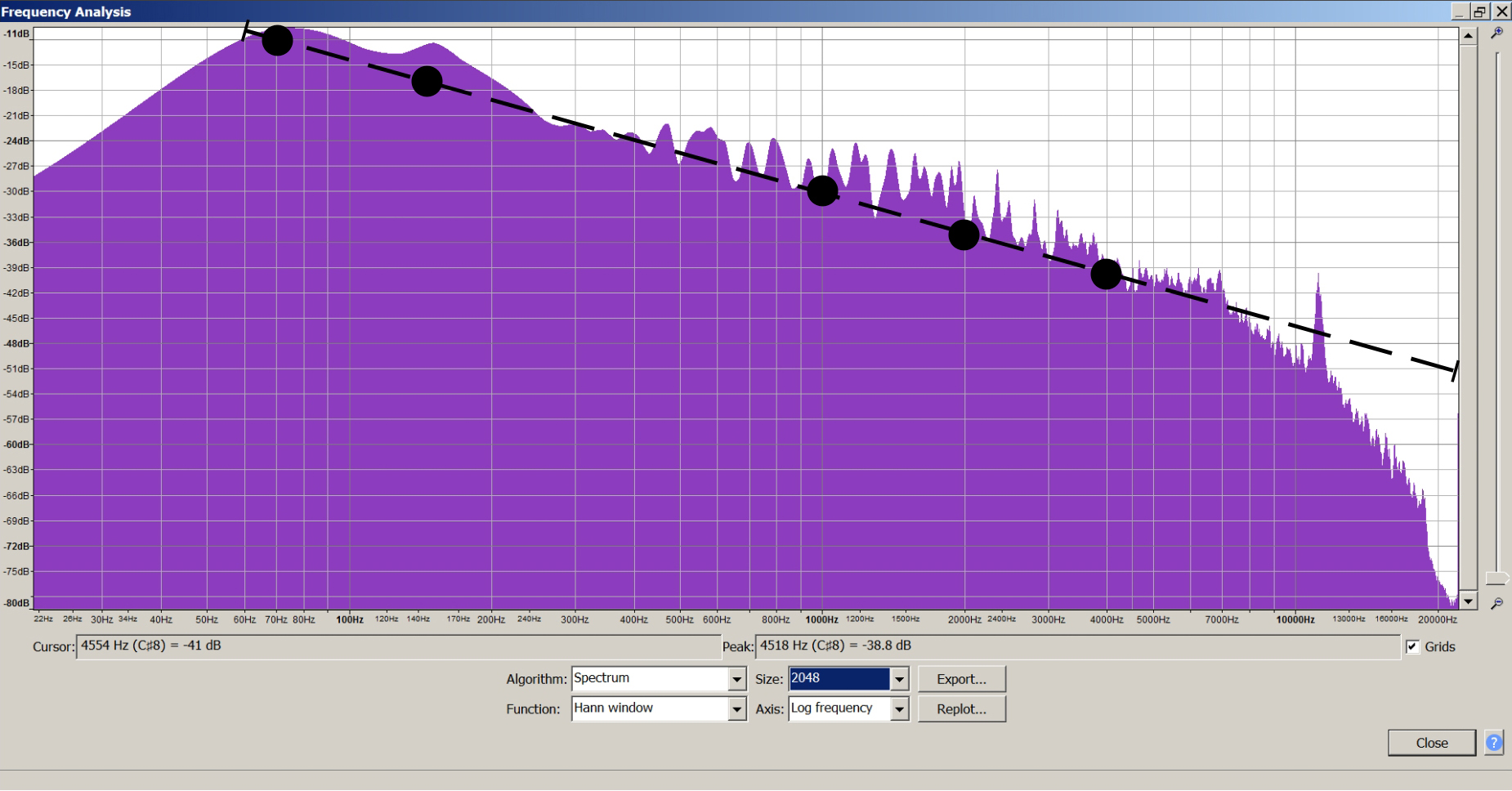
As a small demonstration of the spectral power amplitudes in music, below is a 30 second Fast Fourier Transform from Elton John's "Philadelphia Freedom".
The frequency density plot from Audacity
seems to be based on (voltage) amplitude of each
spectral frequency component, not explicitly power.
In amplitude terms this is: 6dB drop per octave,
or if computed for power: 10dB per decade.
In truth, I'll never drive the KEF 104/2 hard on the TA FB-940R - about '10:30' on the volume dial and the room is starting to resonate!
Finally, here is an online video worth watching ... KEF 104.2 Full Service
Minor corrections and revisions ...
12/10/2020, 13/10/2020, 11/07/2022.
14/10/2020 (speaker sensitivity clarified)