The Technics RS-671
A risky purchase?, possibly?, possibly not? So, as a precaution I studied the aluminium fascia for scratches and corrosion, and then estimated the potential corrosion or rust internally. After some time I decide to take a chance and conveyed my buying concerns to the seller, and offered to buy for 35% lower than his asking price.
There's little doubt that this machine had been left in 'storage' for 10, 20, or more years. There was even a small twig to be found inside the machine next to a smoothing capacitor - my only conclusion was that it had been left in a garage for a very long time.
Some Original Advert Images:

The paintwork on the top of the deck was so poor, I could easily scrap it off, but concerns were more directed towards the inside of the deck.

More original advert pictures ...




I have to confess, I did not take any photographs of the insides of the RS-671 - I just went to work on diagnosing the main problems and fixing many issues.
Internally it wasn't as bad as the external condition of the deck; just as I had calculated!, but much work needed to be done. Smoothing capacitors were probably leaking since during initial testing, only 10v was available to the motors, when it shoud have been around 14v to 14.5v.
The audio section PSU was cleared of debris, and the moldy areas were cleaned and allowed to dry. Later the main power supply capactors were replaced. Even the zener diode on the audio regulator circuit was replaced with a slightly higher voltage value; 20v instead of 18v. I don't have any 18v zener diodes in stock at this moment.

The usual cleaning and lubricating practices were applied to the mechanisms, including all rotating components of the cassette transport.
Since reporting on this Technics RS-671 repair is very time consuming, what follows below, is not generally in the order that these repair jobs were done. Indeed much of the tedious repair work is not written about.
Loose Take-up Spool Idler Tyre
This had worked loose, although the outer rubber was fine, the inner diameter had apparently stretched!
There was no obvious replacement available, so I bought a few idler tyres to try. The actual diameter of the aluminium rim on which the idler will sit, is 14mm.
There was no obvious replacement available, so I bought a few idler tyres to try. The actual diameter of the aluminium rim on which the idler will sit, is 14mm.
A 16.4mm x 11.8mm x 3mm was the best option, but I had to 'sand it down' to an outer working diameter of about 15.5mm. The reason being - the idler would interfere with the take-up spool/reel when the Technics was set to RW mode.
The effective idler diameter was reduced by employing a tight fitting drill bit, and putting the drill into a drill stand while I carefully applied a sanding block to the rotating tyre. Later the tyre was cleaned and Rubber Renue applied.

Rewind/Fast Forward DC Motor
Is a DC motor which appears to work on a centrifugal force principle to regulate it own speed. At a certain angular velocity enough centrifugal force is generated to throw out 'weighted contacts' and temporarily disengage the DC supply from the motor. An access port is provided if angular velocity settings are to altered by the user - in this case I didn't change anything.
The motor was thoroughly cleaned with the aid of a glass fibre pencil and switch cleaner.
 |
| Before Cleaning. |
 |
| Showing it Access Port. |

The motor has to be isolated before returning its original casing.
The Capstan Motor
Based on the uPC1003C2 botor controller; a 'hard to find' IC that (if found) will be costly, so beware!
Note: the photographs that follow, are not in the order in which I worked on the motor.
 |
| Initially I just replaced the two electrlytic caps - both indicated with a white mark. |




 |
| Both motor brush (left) and commutator (right) were cleaned with switch cleaner and a glass fibre pen. |
The rotation of this motor is clockwise.
Motor current demands are dependent on load torque, and if we ignore the basic electronics of the motor controller circuit, Imotor ∝ Tmotor.
At a set speed (usually around 2400rpm) the total load torque is derived from the take-up slip friction action, the flywheel mechanism, and other mechanical frictional losses,
Initial DC current demands from PLAY action were around 125mA, which from my experience is considered too high. This will put a mild current strain on the brush-commutator interface. At that time I used a temporary flat belt from the motor to drive the flywheel. The belt was really too small - 122mm (diameter) x 5mm (width) x 0.6mm (thickness).
After fitting a similar belt with a slacker diameter of 135mm, the load current dropped to a mean of 100mA; much better! This figure was further improved, when the 'new' modified take-up spool/reel idler was fitted to replace a temporary 'O-ring'. Now the mean PLAY DC load current was hovering around 89mA to 90mA.
Motor current demands are dependent on load torque, and if we ignore the basic electronics of the motor controller circuit, Imotor ∝ Tmotor.
At a set speed (usually around 2400rpm) the total load torque is derived from the take-up slip friction action, the flywheel mechanism, and other mechanical frictional losses,
Initial DC current demands from PLAY action were around 125mA, which from my experience is considered too high. This will put a mild current strain on the brush-commutator interface. At that time I used a temporary flat belt from the motor to drive the flywheel. The belt was really too small - 122mm (diameter) x 5mm (width) x 0.6mm (thickness).
After fitting a similar belt with a slacker diameter of 135mm, the load current dropped to a mean of 100mA; much better! This figure was further improved, when the 'new' modified take-up spool/reel idler was fitted to replace a temporary 'O-ring'. Now the mean PLAY DC load current was hovering around 89mA to 90mA.
This figure could be improved still further if and when I decide to reduce the amount of take-up spool slip friction. This can be achieved by effectively reducing the force offered by the compression spring within the take-up hub.
Of interest the motor plus controller load currents with the motor running in PAUSE mode ~ 52mA, and in PLAY mode (without a cassette 'load') ~ 60mA.
With the take-up hub removed and disassembled, I attempted to reduce the amount of compression that the default spring offered. This was more difficult than I first anticipated; how do you reduce the size of a compression spring effectively?
However, with a little effort I did manage to get the PLAY load current into the motor controller down to around 79mA ... 85mA, but a mean value of about 75mA was achievable with another third-party compresson spring that I opted not to use, as it was slightly ill-fitting.
Since this is effectively a 'top loading' cassette deck, it is worth noting that total take-up spool friction during PLAY will statistically be a little higher than for a front-loading cassette machine. So having a good amount of take-up torque is essential, but of course being mindful that it must not be excessive.
 |
| Original Compression Spring for the Take-up Hub |
 |
| DC PLAY loading current ': 79mA ... 85mA. |
Although the motor now works well, I am not 101% confident that all is good; I've had issues with it, and yet have not been able to pinpoint minor problems. So far it's stable with little speed drift, typical figures are usually within ±3Hz (±0.1%) from a 3150Hz ABEX reference tape over 10-15 minutes.
Wow/Flutter
Wow/Flutter
Better than expected considering the state of the deck when I bought it.
After careful 'sanding' of the pinch roller, and a slightly reduced load on the motor, wow & flutter now hovers between 0.04% to 0.07% (JIS WRMS), with an occasional excursion beyond those figures.

All these fixes are provisional, since the RS-671 has so many pending issues to address. Two such issues that are on the list are: (1) Pinch roller replacement, (2) Record-Play multiswitch, which does need to be removed, and internally cleaned due to occasional 'pegging' of the right VU meter.
03/12/2024
Record-Play Multi-switch Fix 05/12/2024
The said switch was carefully de-soldered, and very carefully dissassembled. Then the internal contacts cleaned with a glass-fibre pen and switch cleaner. This procedure is indeed risky, but with patience and perserverence it can be achieved.

{kind=link}
 |
| Retrieving the switches - note the different sliding switches |
 |
| After cleaning with contact cleaner and a glass fibre pencil. |
 |
| Preparing to return the switches. |
All good, no sporadic oscillations in either channel.
System Control
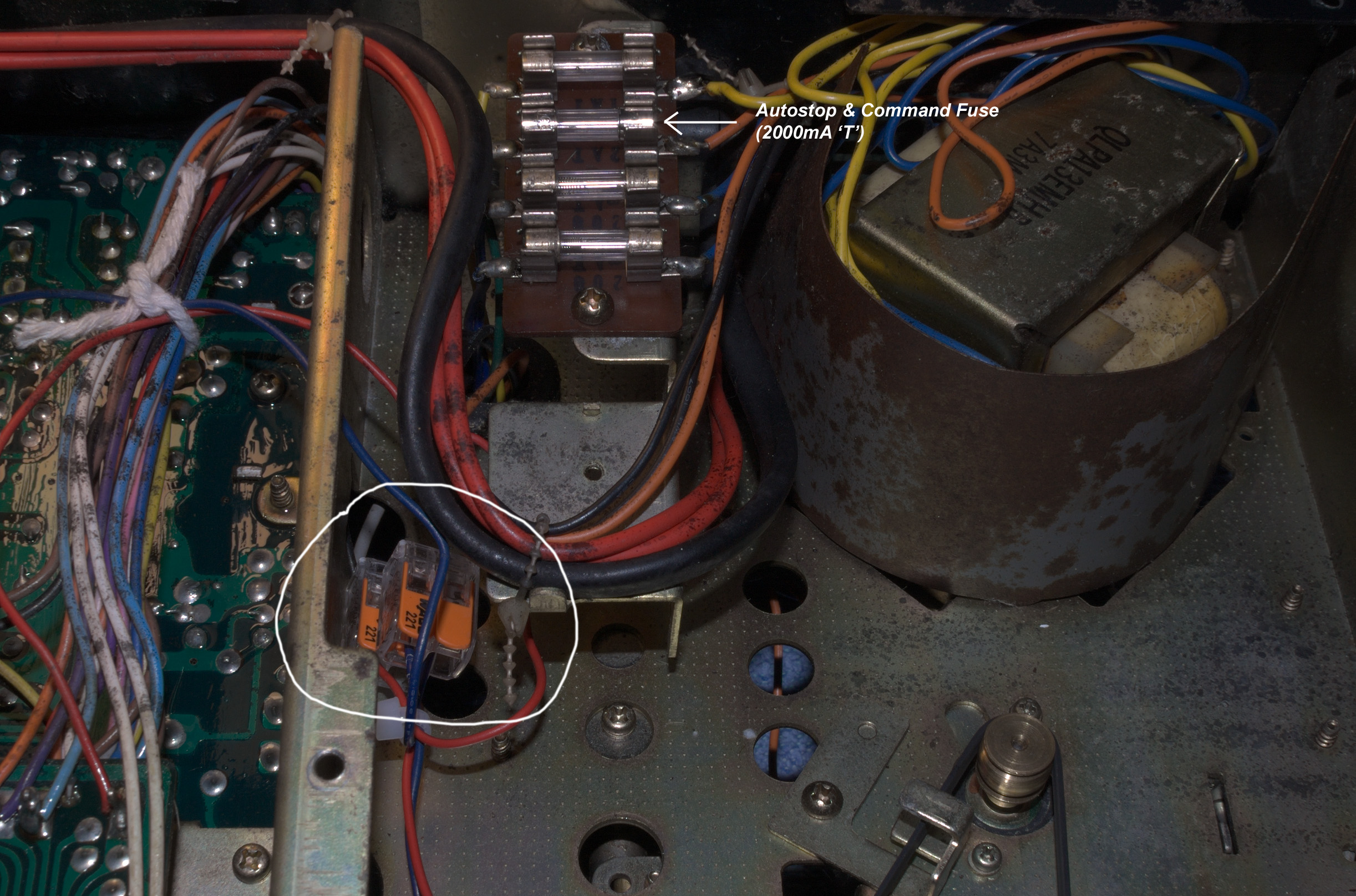
This version of the RS-671 has a set of 4 x 20mm fuses post-transformer, but pre-rectifier.
Attention was brought when the 2000mA 'slow-blow' fuse open-circuited after many testing cycles of the RW/FF circuit. Of interest to the reader - RW/FF DC motor loading current was typically anywhere between 125mA and 225mA, and would rise to approximately 300mA when the RW/FF motor reached the end of the RW/FF operation. This is effectively a stalling condition, where we can expect armature current to be in that 0.3A region.
The circuit below illustrates some circuit loading ac current conditions under either RW or FF, and indeed the large rise of secondary current when the autostop (the final of two phases) is initiated.
 |
| Original Schematic from the RS-671 Service Manual Note: No fuses are suggested? |
18/12/2024
Rewind/Fast Forward Mechanism (Revisited) (22/12/2024)
I wanted to improve the torque for both RW and FF, especially RW as sometimes on difficult 'inertial' cassettes, the RS-671 would struggle. However, most cassette tape are fine - no problem.
There is a sliding mechanism which on the activation of the RW/FF DC motor will swing leftwards for RW, and to the right for FF.
The area underneath the mechanism was cleaned (again) with metal polish to make it as 'friction free' as possible. The guiding mechanism originally had some small rectangular pieces of woven nylon bonded to the mechanism to act to raise the arm, and also to offer a very coeficcient of friction.
The main nylon-like mesh was removed, and underneath the mech a cut piece of polished PTFE (0.5mm thick) was bonded using double-side 'stick tape'.
During RW/FF it is quite possible that any roughness may inhibit good idler to idler contact, hence the motive to change the previous set up.
During RW/FF it is quite possible that any roughness may inhibit good idler to idler contact, hence the motive to change the previous set up.


So far, there is a noticeable improvement in RW/FF torque since Rewind is almost 100% likely to finish the Rewind task for one difficult cassette tape I have in my possession. The torque may be further improved if the knurling on the motor drive was deeper? However, for now, it is unlikely that the machine is going to be opened up again for a while.

Wago Connectors
Supply to both DC motors is now made via four Wago connectors. This is more convenient so that measuring loading current during PLAY, RW and FF operations can be done without resorting to de-soldering and re-soldering.

(Article is subject to corrections, and additions without notice.)